Traditional industrial robots feature rigid and often mighty arms, performing tasks in assembly lines, material handling, and inspection with precision. They are typically fenced off to prevent injuries to workers. Safety concerns are addressed to some extent by collaborative robots, or co-bots, that use sensory feedback and advanced controls to allow them to work alongside humans. What if we have robots made of entirely squishy materials that are intrinsically safe to humans and delicate objects? Think about Baymax in the Disney animated film, Big Hero 6. That science fiction is coming true, slowly but steadily.
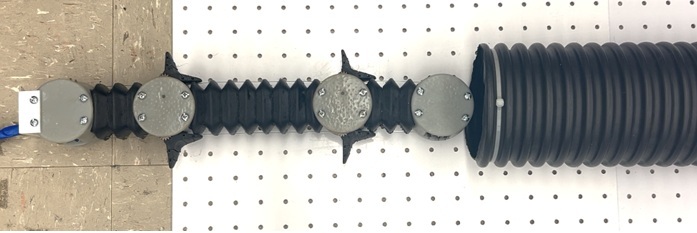
| Fig. 1: An earthworm-inspired crawling robot for subsurface agricultural drainage pipe inspection. |
Meet soft robotics, a field in robotics that has seen tremendous growth in the last 15 years. Often inspired by biology, such as octopus tentacles, elephant trunks, and caterpillars, soft robots leverage compliant and even stretchable sensors, actuators, and structures to realize manipulation and locomotion. Unlike traditional manipulators, which use motors to drive individual rigid links, soft robotic manipulators employ soft arms and grippers enabled by pneumatics, cable-actuation, or smart materials. For example, a slender cylindrical structure with three chambers, created by silicone casting, can bend in an arbitrary direction when a proper combination of air pressures is applied to the chambers. Bending could also be generated by differential pulling of cables embedded in a slender structure. The Smart Microsystems Laboratory at Michigan State University has developed soft robots actuated by pneumatics, cable-pulling, and active materials, and is exploring their various applications in automation.
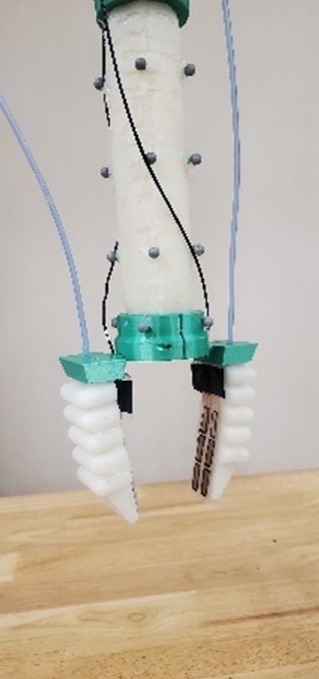
| Fig. 2: A soft robotic manipulator equipped with force sensor arrays on its gripper fingers for feedback control. |
One example is an earthworm-inspired robot (Fig. 1) that contracts and expands its 3D-printed compliant bellows to move inside corrugated drainage pipes. The U.S. subsurface drainage infrastructure serves more than 53 million areas of cropland, and plays a critical role in increasing crop yield, reducing year-to-year yield variability and ensuring timely field operations and trafficability. Buried underground and invisible, drainage pipes are difficult to access or inspect. This is where our worm robot comes in – it uses flexible fins, which are designed to have different bending stiffness in opposite directions, to interact with the corrugation of the pipe and achieve inchworm-type movement as its bellows go through cyclic contraction and elongation. Carrying a camera and environmental sensors, the robot is able to inspect pipe conditions with an inherent localization capability derived from its movement principle.
In another example a soft robotic arm is explored in our lab for agricultural harvesting. Labor cost, labor shortage, and worker welfare considerations are driving the need for robotic harvesting. However, the delicate nature of fruits and vegetables presents a challenge to rigid mechanical harvesters, which could easily damage tree branches or bruise or even crush fruits. A soft robot alleviates these concerns. We have further equipped its soft fingers with flexible pressure sensor arrays, which allow the robot to receive force feedback and thus apply proper gripping force in harvesting and handling (Fig. 2). Beyond harvesting and produce handling, such soft robots are well suited for other manipulation tasks, including packaging, assembly, and material sorting involving delicate or irregularly shaped items (for instance, soft foods, textiles, and fragile electronics). Again, their built-in compliance and safety can make them close companions of human workers.
Soft robots hold potential in many other applications, especially those involving humans, such as providing physical support for older adults and preventing sports injuries. Realizing these benefits requires advances in multiple areas: new materials, additive manufacturing, machine learning/AI, human-robot interaction, and sociotechnical systems. At Michigan State University, we engage academic and industry partners to pursue convergent research and development of soft robotic systems to catalyze the fruition of their potentials.
Learn more about the MSU College of Engineering here.
Dr. Xiaobo Tan is an MSU Foundation Professor and the Richard M. Hong Endowed Chair in Electrical and Computer Engineering at Michigan State University. He received his Bachelor's and Master's degrees in automatic control from Tsinghua University, Beijing, China, in 1995, 1998, respectively, and his Ph.D. in electrical and computer engineering from the University of Maryland in 2002. His research includes underwater robotics, soft robotics, smart materials, and control systems. He has published over 300 papers and been awarded 7 US patents in these areas. Dr. Tan is a Fellow of IEEE and ASME and the recipient of distinguished academic awards. He is currently the Editor-in-Chief-elect for IEEE/ASME Transactions on Mechatronics.